Povečanje zahtev za koordinatne sisteme določa potrebo po razvoju novih navigacijskih načel. Predvsem je eden od pogojev, ki narekuje sedanjost, uvedba relativno neodvisnih sredstev za merjenje lokacije ciljnih objektov. Takšne zmogljivosti zagotavljajo inercialni navigacijski sistem, ki odpravlja potrebo po uporabi signalov radijskih svetilnikov in satelitov.
Splošne informacije o tehnologiji
Inercialna navigacija temelji na zakonih mehanike, ki omogočajo beleženje parametrov gibanja teles glede na vzpostavljen referenčni sistem. To načelo navigacije je bilo prvič uporabljeno pred kratkim v ladijskih žiro kompasih. Z izbolj {anjem merilnih instrumentov te vrste je bila narejena metoda, ki je merila parametre dolo ~ ila na podlagi pospe {kov teles. Teorija o inercialnem navigacijskem sistemu se je začela oblikovati bližje tridesetim let prejšnjega stoletja. Od tega trenutka so raziskovalci te smeri začeli več pozornosti posvetiti načelom stabilnosti mehanskih sistemov. V praksi je ta koncept težko izvajati, zato je dolgo ostal le v teoretični obliki. Toda v zadnjih desetletjih so se s pojavom posebne opreme na podlagi računalnikov aktivno uporabljala sredstva inercialne navigacije v letalstvu, vodnem inženirstvu itd.
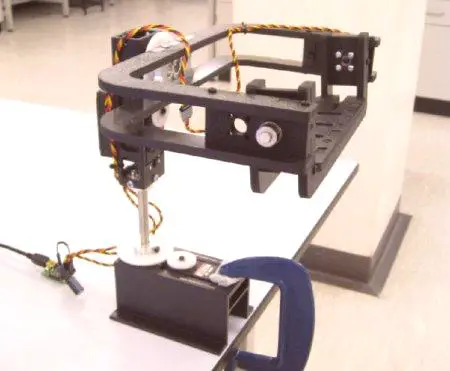
Obvezni elementi katerega koli inercialnega sistema so bloki občutljivostimerilne naprave in računalniške naprave. Prva kategorija elementov so žiroskopi in merilniki pospeška, druga pa računalniška tehnika, ki izvaja določene algoritme izračunov. Natančnost metode je v veliki meri odvisna od značilnosti občutljivih naprav. Na primer, zanesljivi podatki lahko zagotovijo inercialne navigacijske sisteme samo z giroskopi natančnega tipa v povezavi z merilniki pospeška. Toda v tem primeru ima tehnična oprema resno pomanjkljivost v obliki velike kompleksnosti elektromehanskega polnjenja, da ne omenjamo velike velikosti opreme.
Načelo obratovanja sistema
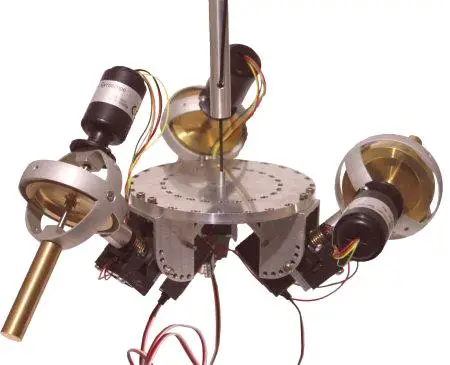
Metoda določanja koordinat z uporabo inercialnega sistema je obdelava podatkov o pospeševanju teles in njihovih kotnih hitrosti. V ta namen se ponovno uporabijo občutljivi elementi, nameščeni neposredno na ciljni objekt, ki generira informacije o lokaciji, poteku gibanja, prehodni poti in hitrosti. Poleg tega načelo inercialnega navigacijskega sistema omogoča uporabo sredstev za stabilizacijo in celo avtomatsko kontrolo objekta. Za te namene se uporabljajo samo senzorji linearnega pospeševanja z giroskopsko opremo. S pomočjo teh naprav se ustvari sistem poročil, ki delujejo glede na pot gibanja objekta. Ustvarjeni koordinatni sistem določa kot naklona in struženje. Prednosti te tehnologije so avtonomija, sposobnost avtomatizacije in visoka stopnjaimunost.Klasifikacija inercialnih navigacijskih sistemov
\ t
Načini za določanje orientacije platformnih sistemov
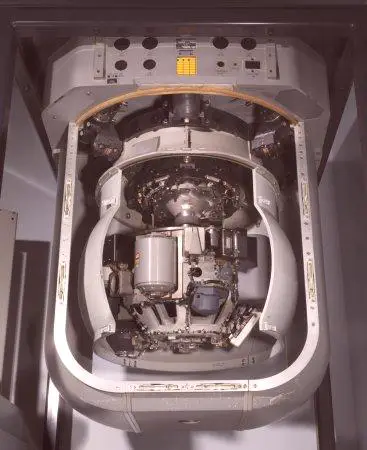
Ne izgubi pomena in sistemov, ki delajo s platformami za določanje izvornih podatkov o dinamiki objekta. Trenutno se uspešno uporabljajo naslednji tipi inercialnih navigacijskih modelov platform:Geometrijski sistem. Standardni model z dvema platformama, ki je bil opisan zgoraj. Takšni sistemi so zelo natančni, vendar imajo omejitve pri servisiranju vozil z velikim manevrskim prostorom, ki delujejo v vesolju.Analitični sistem. Prav tako so prisotni akcelerometri in žiroskopi, ki so stacionarni glede na zvezde. Prednosti takšnih sistemov so zmožnost učinkovitega rokovanja z manevriranimi predmeti, kot so rakete, helikopterji in borec. Tudi v primerjavi z inercialnim navigacijskim sistemom brez platforme analitični kompleksi kažejo nizko natančnost določanja parametrov dinamike objekta. Polanalitični sistem. Zagotavlja ga ena platforma, ki se stalno stabilizira v prostoru lokalnega obzorja. Na tej podlagi so nameščeni žiroskop in merilnik pospeška, izračuni pa so organizirani zunaj delovnega odra.Značilnosti inercialno-satelitskih sistemov
To je obetaven razred integriranih navigacijskih sistemov, ki združujejo prednosti virov satelitskih signalov in obravnavajo inercialne modele. Za razliko od priljubljenih satelitskih sistemov takšni kompleksi omogočajo dodatno uporabo podatkov o kotni orientaciji in oblikujejo neodvisne algoritme za določanje lokacije v odsotnosti navigacijskih signalov. Pridobivanje dodatnih geolokacijskih informacij vam omogoča, da tehnično poenostavite modele občutljivih elementov, tako da se odreče dragi opremi. Prednosti inertnega satelitskega navigacijskega sistema vključujejo nizko težo, majhnost in poenostavljene sheme obdelave podatkov. Po drugi strani pa nestabilnost mikroelektromehanskih žiroskopov povzroča kopičenje napak pri določanju podatkov.
Območjauporaba inercialnih sistemov
Med potencialnimi potrošniki inercialne navigacijske tehnologije so predstavniki različnih industrij. To niso samo kozmonautika, letalstvo, ampak tudi avtomobilski (navigacijski sistemi), robotika (nadzor kinematičnih značilnosti), šport (določanje dinamike gibanja), medicina in celo gospodinjski aparati itd.

Teorijo inercialne navigacije, katere koncept se je začel oblikovati v prejšnjem stoletju, je danes mogoče obravnavati kot popoln del mehatronike. Vendar pa nedavni napredki kažejo, da se lahko pojavijo naprednejša odkritja. To dokazuje tesna interakcija inercialnih navigacijskih sistemov z računalništvom in elektroniko. Obstajajo nove ambiciozne naloge, razširitev prostora za razvoj sorodnih tehnologij, prav tako temeljijo na teoretični mehaniki. Hkrati pa se strokovnjaki v tej smeri aktivno ukvarjajo z optimizacijo tehničnih objektov, med katerimi se lahko imenujejo mikromehanski žiroskopi.