Pri delu z Arduinom mnogi radioamaterji uporabljajo motorje po korakih. Toda kaj je to? Kako ga povezati? In kako delati z njim? In na splošno, kje se uporabljajo? Odgovori na vsa ta vprašanja bodo predstavljeni v tem članku.
O koračnih motorjih
Lahko rečemo, da so koračni motorji osnova natančne robotike. Uporabljajo se povsod zaradi svoje natančnosti. Dejstvo je, da koraki pri obračanju gredi uporabljajo majhne korake, kar jim omogoča, da so natančni pri delu. To je bilo zaradi njihovih "korakov" in se je začelo imenovati koračni motorji. Vzemite na primer tiskalnik. Tudi tu se uporablja koračni motor. Ali kateri koli manipulator, kjer je natančnost zelo pomembna, ker tudi če robot naredi polovico napake - vse bo šlo narobe. Analogni koračni motorji se lahko štejejo za servo pogone, saj njihovo programiranje kaže tudi stopnjo vrtenja, toda servo nižje od koračnih motorjev v natančnosti. Vendar pa obstaja veliko situacij, kjer je uporaba servo pogonov primernejša kot uporaba "hodnikov".
Koračni motor 28BYJ-48
Med številnimi izbiro koračnih motorjev je ravno koračni motor modela 28BYJ-48. Stane precej poceni, samo 100-150 rubljev na kos. Kakšen je koračni motor za Ardouine, je videti na spodnji fotografiji.
Številni radijski amaterji raje ta model zaradi nizkih cen in dobre natančnosti. Vrsta motorja - unipolarno, število faz - 4. Potrošnjakoračni motor za Arduinov od 5 do 12V. Vendar pa je priporočljivo uporabiti 6-7V. Motorji lahko delujejo na dva načina: polni in polstopnji. Priporočljivo za uporabo v poltaktnem načinu. To je 5625 stopinj na korak. Ko je polni korak za korakom podan 1125 stopinj. Teža motorja - 30 gramov.
Gonilnik ULN2003
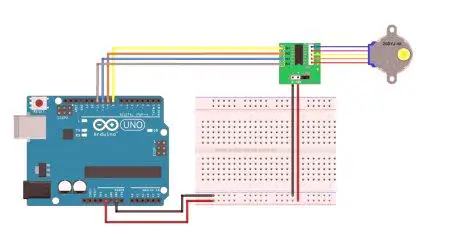
Za priključitev koračnega motorja na Arduinov je uporabljen poseben gonilnik. Eden od njih je ULN2003. To je posledica dejstva, da ko teče koračni motor, je moč toka precej močna, kar Arduino stiki preprosto ne morejo vzdržati. V ta namen uporabite gonilnik. Motor se sam poveže z voznikom, skoraj je nemogoče vse zmedeti, saj je ključ, ki kaže, kako natančno se povezati. No, in potem se voznik sam poveže z Arduinom za nadaljnje delo. Pogosto je v trgovinah na voljo tudi koračni motor. Vendar pa obstajajo primeri, ko so motorji prodajajo brez voznika, morate paziti na to. Če kupite Aliexpress, je bolje, da delajo samo z dokazano prodajalci s številnimi pregledi.
Povezava
Kot je navedeno zgoraj, se za poganjanje koračnega motorja uporablja Arduin. Za napajanje motorja morate uporabiti drug vir, da se izognete preobremenitvi kartice Arduino. In druge zaključke, začenši z IN1 do IN4, se povežemo z vsemi digitalnimi stiki na "Arduinov". Kot lahko vidite, je priključitev koračnega motorja na Arduin zelo preprosta. Na sliki je prikazan primer povezave.
Urad
Zaupravljanje stepskih motorjev iz "Ardouinova" kot dela razvojnega okolja že ima pripravljeno knjižnico, ki vam omogoča nadzor motorja z majhno programsko kodo. Če ne bi bilo, bi morali s pomočjo posebne tabele sestaviti in izračunati gibanje motorja, kar bi trajalo veliko časa. Vendar pa obstaja tudi minus te knjižnice. Dejstvo je, da omogoča uporabo motorja samo v polni fazi. Čeprav je na začetku priporočljivo uporabiti "stepper" v polstopnji. Ampak za preproste projekte, ki uporabljajo enostopenjski motor, je ta knjižnica primerna. Imenuje se Stepper. Lahko napišete kodo za krmiljenje koračnega motorja iz "Arduina". Skica izgleda kot spodnji primer.
# vključuje
const int stepsPerRevolution = 200;
Stepper myStepper (stepPerRevolution, 891011); //povezava z zatiči 811 na Arduinov
void setup () {
myStepper.setSpeed (60); //nastavitev hitrosti rotorja
Serijska vrednost (9600);
}
void loop () {
//Funkcija čaka na ukaz za pretvorbo besedila in pošlje signal motorju, da ga vrti na določeno število korakov.
Serial.println ("Premakni desno"); //v smeri urinega kazalca
myStepper.step (stepsPerRevolution);
zakasnitev (1000);
Serial.println ("Premakni levo"); //v nasprotni smeri urinega kazalca
myStepper.step (-stepsPerRevolution);
zakasnitev (1000);
}To je primer iz same knjižnice za nadzor koračnih motorjev. Določite lahko, koliko korakov morate opraviti in koliko hitro. Razmislite o kodi podrobneje. Na samem začetku je knjižnica Stepper že povezanarečeno je bilo zgoraj. Po tem izdelamo matriko s številom korakov, ki jih mora izvajati koračni motor. Nato se ustvari spremenljivka koračnega tipa s podatki s pomočjo stikov, ki so povezani s koračnim motorjem Arduino. Hitrost je nastavljena in je že proces gibanja koračnega motorja. Če pa želite v vašem projektu uporabiti več kot en motor in delati v polstopenjskem načinu, lahko uporabite knjižnice drugih proizvajalcev. Ena od teh je Accel Stepper. Ta knjižnica se je zelo dobro izkazala pri delu, ima veliko priložnosti. Pri delu z njenimi koraki so natančni, motorji se ne segrejejo. Na splošno je priporočljiva za uporabo. Če želite namestiti knjižnico, morate prenesti in prenesti vsebino arhiva v mapo Libraries v korenskem imeniku Arduino. V tem članku smo obravnavali primer priključitve koračnega motorja na Arduinov, kot tudi njegov nadzor s programsko kodo. Vsak radioamater mora vsaj enkrat v svojih projektih poskušati delati z njim!