Elektromotorji brez eksplozije se uporabljajo v medicinski tehnologiji, aeromodeliranju, cevovodih za naftovode, pa tudi v mnogih drugih panogah. Vendar imajo svoje pomanjkljivosti, značilnosti in koristi, ki včasih igrajo ključno vlogo pri oblikovanju različnih naprav. Ne glede na primer, taki elektromotorji zasedajo sorazmerno majhno nišo v primerjavi z asinhronimi AC stroji.
Značilnosti elektromotorjev
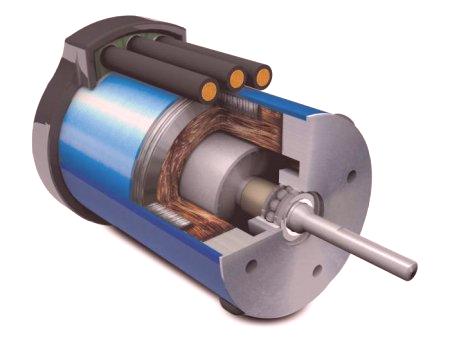
Eden od razlogov, zakaj so oblikovalci zainteresirani za precizne elektromotorje, je potreba po hitrih motorjih z majhnimi velikostmi. Poleg tega imajo ti motorji zelo natančno pozicioniranje. Oblika ima premični rotor in stacionarni stator. Na rotorju je en trajni magnet ali več, ki so razporejeni v določenem zaporedju. Pri statorju so tuljave, ki ustvarjajo magnetno polje.
Treba je omeniti še eno značilnost - električni motorji s polnim krogom imajo lahko sidro, ki se nahaja na notranji in zunanji strani. Zato lahko dve vrsti modelov imata določeno uporabo na različnih področjih. Ko je sidro nameščeno v notranjosti, je mogoče doseči zelo visoko hitrost, tako da ti motorji zelo dobro delujejo v konstrukcijah hladilnih sistemov. V primeru, da je vgrajen pogon z zunanjim rotorjem, je to mogočedoseči zelo natančno pozicioniranje, kot tudi visoko odpornost na preobremenitev. Zelo pogosto se ti motorji uporabljajo v robotiki, medicinski opremi in strojih s frekvenčno kontrolo.
Kako delujejo motorji
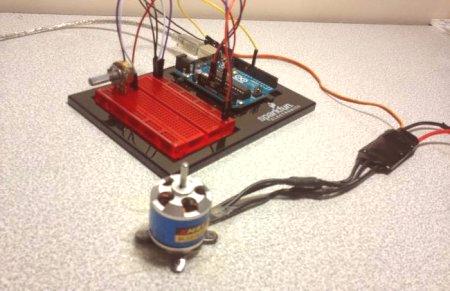
Za pogon rotorja brezkontaktnega elektromotorja enosmernega toka je potrebno uporabiti poseben mikrokrmilnik. Ne more se izvajati na enak način kot sinhroni ali asinhroni stroj. S pomočjo mikrokrmilnika vklopite navitja motorja tako, da je smer vektorjev magnetnega polja na statorju in sidra pravokotna.
Z drugimi besedami, s pomočjo voznika je mogoče prilagoditi navor, ki deluje na rotor kolektorskega motorja. Za premikanje sidra je potrebno pravilno vklopiti v navitjih statorja. Na žalost ni mogoče zagotoviti gladkega nadzora rotacije. Lahko pa zelo hitro povečate hitrost rotorja elektromotorja.
Razlike v kolektorskih in kolektorskih motorjih
Glavna razlika je v tem, da na kolektorskih motorjih za modele ni navitja na rotorju. Pri kolektorskih motorjih imajo njihovi rotorji navitja. Toda stalni magneti so nameščeni na mirujočem delu motorja. Poleg tega je na rotorju nameščen poseben oblikovalec kolektor, ki je povezan grafitnih ščetk. Z njihovo pomočjo se na navitje rotorja priključi napetost. Bistven je tudi princip delovanja kolektorskega elektromotorjaje drugačen.
Kako deluje naprava za zbiranje
Za zagon kolektorskega motorja je potrebno napetost uporabiti na navitju vzbujanja, ki se nahaja neposredno na sidru. V tem primeru nastane trajno magnetno polje, ki medsebojno deluje z magneti na statorju, s čimer nastane sidra in montiran kolektor. To se hrani na takem navijanju, ponavlja se cikel.
Hitrost vrtenja rotorja je neposredno odvisna od intenzivnosti magnetnega polja, slednja pa je neposredno odvisna od velikosti napetosti. Torej, za povečanje ali zmanjšanje hitrosti vrtenja, morate spremeniti napajalno napetost. Za izvedbo obratnega obratovanja je treba spremeniti le polariteto priključka motorja. Za takšen nadzor vam ni treba uporabljati posebnih mikrokontrolerjev, hitrost vrtenja pa lahko spreminjate z običajnim izmeničnim uporom.
Značilnosti strojev, ki se ne zbirajo
Toda tukaj ni mogoče nadzorovati polnega električnega motorja brez uporabe posebnih krmilnikov. Izhajajoč iz tega lahko sklepamo, da kot generator ne moremo uporabiti takšnih motorjev. Za učinkovito krmiljenje lahko spremljate položaj rotorja z več Hall senzorji. S tako enostavnimi napravami je mogoče bistveno izboljšati zmogljivost, vendar se bo strošek elektromotorja večkrat povečal.
Zagon turbulentnih motorjev
\ t
Izdelajte mikrokrmilnike samibrez smisla, veliko boljša možnost bo nakup dokončanih, naj bo kitajska. Pri izbiri pa je treba upoštevati naslednja priporočila:
Upoštevajte največjo dovoljeno jakost toka. Ta možnost bo zagotovo uporabna za različne vrste pogona. Značilnosti proizvajalcev pogosto navedejo neposredno v imenu modela. Zelo redko kažejo vrednosti, ki so značilne za konične režime, pri katerih mikrokrmilnik ne more delovati dolgo časa.
Pri dolgotrajnem delu je treba upoštevati največjo vrednost napajalne napetosti.
Upoštevajte upor vseh notranjih vezij mikrokrmilnika.
Treba je upoštevati največje število obratov, ki je značilno za delovanje mikrokrmilnika. Upoštevajte, da ne bo mogel povečati največje hitrosti vrtenja, ker so omejitve na ravni programske opreme.
Poceni modeli mikrokrmilniških naprav imajo frekvenco generiranih impulzov v območju 78 kHz. Drage primere je mogoče reprogramirati in ta parameter se poveča za 2-4 krat.
Poskusite izbrati mikrokrmilnike za vse parametre, saj vplivajo na moč, ki jo lahko razvije električni motor.
Kako poteka krmiljenje
Elektronska krmilna enota omogoča preklapljanje navitij pogona. Za določitev preklopnega trenutka s pomočjo voznika se nadzoruje položaj rotorja iz Hallovega senzorja, ki je nameščen na pogonu.
Če takih naprav ni,potrebno je prebrati povratno napetost. Nastane se v statorskih kolobarjih, ki niso priključeni ob določenem času. Krmilnik je strojni in programski kompleks, ki vam omogoča, da spremljate vse spremembe in natančno določite vrstni red komutacije.
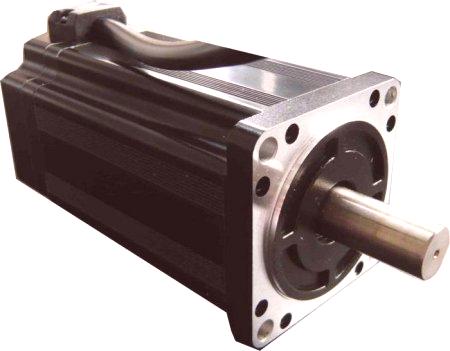
Trofazni turbo brez električni motorji
Veliko polnih elektromotorjev za zračne modele je izdelanih za enosmerni tok. Obstajajo pa trifazni primeri, v katerih so nameščeni pretvorniki. Omogočajo vam trifazne impulze s konstantno napetostjo.
Delo je naslednje:
Impulze s pozitivno vrednostjo se prejmejo na tuljavo "A". Na tuljavi "B" - z negativno vrednostjo. Posledično se bo sidro začelo premikati. Senzorji zajamejo pristranskost in pošljejo signal krmilniku za naslednje preklapljanje.
Prihaja do odklopa tuljave "A", pri čemer impulz pozitivne vrednosti prihaja na navitje "C". Preklapljanje navitja "B" se ne bo spremenilo.
Na tuljavo "C" je pozitiven impulz, negativ pa vstopi v "A".
Nato sledi delo par "A" in "B". Dobili so pozitivne negativne vrednosti impulzov.
Nato pozitivni zagon ponovno vstopi v tuljavo "B", negativna pa na "Z".
Na zadnji stopnji je vključitev tuljave "A", ki prejme pozitivni impulz, in negativna gre za C.
In potem se ponovi celoten cikel.
Prednosti uporabe
Izdelava prostoročnega električnega motorja brez zbirkeTežko je izvajati krmiljenje mikrokrmilnika. Zato je najbolje uporabiti že pripravljene industrijske modele. Vendar upoštevajte prednosti, ki jih ima pogon pri uporabi kolektorskih elektromotorjev:
Obstaja bistveno večji vir od zbiralnikov.
Visoka stopnja učinkovitosti.
Moč je višja od moči kolektorskih motorjev.
Hitrost tipkanja je veliko hitrejša.
Med delovanjem ne nastajajo iskre, zato se lahko uporabljajo v razmerah z visoko nevarnostjo požara.
Zelo enostavno upravljanje pogona.
Pri delu ni potrebe po uporabi dodatnih komponent za hlajenje.
Ena od slabosti je zelo visoka cena, glede na ceno upravljavca. Tudi za kratek čas se tak električni motor ne vklopi za preverjanje učinkovitosti. Poleg tega je popravilo takih motorjev veliko težje zaradi oblikovnih značilnosti.